
Final Goals of your Project/s:
Previous versions of a gravitational offloading device for limbs have utilized passive mechanisms, such as springs, to alleviate the effects of gravity on the shoulders and upper arms of test subjects and astronauts. This device is used for training in reduced-gravity environments. The goal for the active version of this apparatus is to introduce a variable offloading mechanism capable of providing a more precise gravitational offload, depending on the arm’s orientation. In essence, the kinematics of this method have been developed, alongside an initial prototype. A pulley system is employed to lift the upper arm similarly to a marionette puppet. Ongoing rapid prototyping is focused on iterating through improved designs for the ARC-ANGEL, aiming to reduce both its volumetric footprint and material costs.
Describe what you did during your internship:
My role as an intern was to focus on improving the CAD design to reduce the footprint of the brackets and pulley system for ARC-ANGEL. Currently, the device utilizes custom-made aluminum parts produced by a third-party supplier, which are costly and lead to delays incompatible with rapid prototyping needs. I also explored alternative materials such as NylonX and manufacturing techniques like 3D printing as ways to maintain structural strength while significantly cutting down on production time and costs.
Did you achieve your goals? What were the results?:
Yes – the goals of this project were achieved as improved designs were proposed for ARC-ANGEL. While the success criteria relies on prototype testing which has not been completed yet, new designs were proposed in hopes of achieving a smaller volumetric footprint and cost.
Describe positive lessons learned:
As this internship was done virtually, I learned to create a work-life balance and improve my communication skills with my lab and mentor to make sure I was in the loop on project changes and updates.
Describe negative lessons learned:
The virtual aspect of this internship made it challenging to feel well-integrated into the projects and networking opportunities that would have been available if I was on-site. It also made it difficult to ask questions and be more involved on numerous projects like I have been able to do in the past.





 My research focuses on the synthesis and development of glassy solid-state electrolytes for use in solid-state lithium-ion batteries. I am working to develop novel glass compositions that exhibit high ionic conductivities, excellent electrochemical stability, and easy low-temperature processing. These novel compositions are being made in large-scale batches to generate a rectangular preform, which I then reheat and pull into a thin film less than 100 microns in thickness, through the glass redraw process. Concurrently, I am working to develop a composite cathode, utilizing sulfur, glassy solid-state electrolytes, and conductive carbon to generate a highly energy dense sulfur cathode to be paired with a lithium metal anode for superior volumetric and gravimetric energy density compared to current lithium-ion batteries utilizing intercalation cathodes. I hope to generate several successful full-cell all-solid-state lithium-ion batteries utilizing my composite sulfur cathode, a drawn thin film glassy solid-state electrolyte, and a lithium metal anode. This project relates to the NASA mission for the Space Technology Directorate through the need for highly energy dense, long-lasting batteries for use in nearly all space missions.
My research focuses on the synthesis and development of glassy solid-state electrolytes for use in solid-state lithium-ion batteries. I am working to develop novel glass compositions that exhibit high ionic conductivities, excellent electrochemical stability, and easy low-temperature processing. These novel compositions are being made in large-scale batches to generate a rectangular preform, which I then reheat and pull into a thin film less than 100 microns in thickness, through the glass redraw process. Concurrently, I am working to develop a composite cathode, utilizing sulfur, glassy solid-state electrolytes, and conductive carbon to generate a highly energy dense sulfur cathode to be paired with a lithium metal anode for superior volumetric and gravimetric energy density compared to current lithium-ion batteries utilizing intercalation cathodes. I hope to generate several successful full-cell all-solid-state lithium-ion batteries utilizing my composite sulfur cathode, a drawn thin film glassy solid-state electrolyte, and a lithium metal anode. This project relates to the NASA mission for the Space Technology Directorate through the need for highly energy dense, long-lasting batteries for use in nearly all space missions.
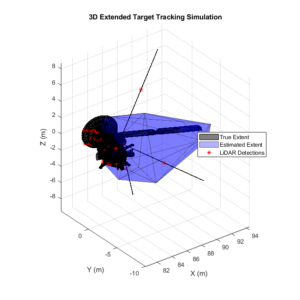 My current work is concerned with Light Detection and Ranging (LiDAR) sensing for spacecraft rendezvous maneuvers. Although LiDAR has been used in spacecraft relative navigation for decades, existing methods require target-mounted reflectors to identify and track the target. In many cases, such as spacecraft debris removal, on-orbit servicing, and asteroid rendezvous, navigational aids may be unavailable. An improved image processing algorithm is needed to enable LiDAR-based navigation in these situations. Extended target tracking (ETT), defined as the estimation of the extent and kinematics of one or more objects in a surveillance region based on sparse sets of sensor measurements collected over time, has the potential to supply navigational information for spacecraft. Multiple researchers have developed ETT algorithms for autonomous driving, but cars are constrained to 3 degrees of freedom. This project seeks to develop a novel 6-degree-of-freedom ETT algorithm for spacecraft relative navigation. The resulting technology will extract more navigational information from on-orbit LiDAR measurements than previously possible by tracking the shape, pose, and kinematics of target satellites in 3D.
My current work is concerned with Light Detection and Ranging (LiDAR) sensing for spacecraft rendezvous maneuvers. Although LiDAR has been used in spacecraft relative navigation for decades, existing methods require target-mounted reflectors to identify and track the target. In many cases, such as spacecraft debris removal, on-orbit servicing, and asteroid rendezvous, navigational aids may be unavailable. An improved image processing algorithm is needed to enable LiDAR-based navigation in these situations. Extended target tracking (ETT), defined as the estimation of the extent and kinematics of one or more objects in a surveillance region based on sparse sets of sensor measurements collected over time, has the potential to supply navigational information for spacecraft. Multiple researchers have developed ETT algorithms for autonomous driving, but cars are constrained to 3 degrees of freedom. This project seeks to develop a novel 6-degree-of-freedom ETT algorithm for spacecraft relative navigation. The resulting technology will extract more navigational information from on-orbit LiDAR measurements than previously possible by tracking the shape, pose, and kinematics of target satellites in 3D.

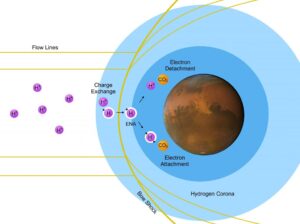 This research project focuses on how the solar wind interacts with the Martian atmosphere. As solar wind protons propagate towards Mars, they can interact with Mars’s extensive hydrogen corona through a process of charge exchange. These solar wind protons can obtain an electron from neutral atomic hydrogen in the corona, becoming fast energetic neutral atoms (ENAs) that maintain upstream solar wind velocity. These ENAs can bypass electromagnetic boundaries around the planet and penetrate to altitudes of ~130 km in the Martian atmosphere. Along their path of propagation, ENAs can undergo multiple charge-changing collisions as they interact with atmospheric neutrals (primarily CO2), resulting in observable beams of H+ and H– in the collisional atmosphere of Mars. The goal of this project is to characterize the properties of H– and H+ energy spectra in order to better understand charge exchange processes in the Martian atmosphere.
This research project focuses on how the solar wind interacts with the Martian atmosphere. As solar wind protons propagate towards Mars, they can interact with Mars’s extensive hydrogen corona through a process of charge exchange. These solar wind protons can obtain an electron from neutral atomic hydrogen in the corona, becoming fast energetic neutral atoms (ENAs) that maintain upstream solar wind velocity. These ENAs can bypass electromagnetic boundaries around the planet and penetrate to altitudes of ~130 km in the Martian atmosphere. Along their path of propagation, ENAs can undergo multiple charge-changing collisions as they interact with atmospheric neutrals (primarily CO2), resulting in observable beams of H+ and H– in the collisional atmosphere of Mars. The goal of this project is to characterize the properties of H– and H+ energy spectra in order to better understand charge exchange processes in the Martian atmosphere.